专注汽车和摩托车资讯分享
Car and motorcycle information sharing


前段时间小鹏P7在高架上发生的事故想必很多朋友都略有耳闻,简单来讲就是一位小鹏P7车主在高架桥路段行驶中开启车辆的LCC 2.5辅助驾驶功能,但因车辆未及时识别前方物体提前发出预警,自己也刚好分神,导致车辆以80km/h的时速撞击前方停止的故障车辆,悲剧就此发生。

根据网络上流出的小鹏P7车主的聊天记录来看,小鹏P7事发时是在LCC状态,而什么是LCC,我们在小鹏官网找到了相关功能描述。
根据小鹏汽车官方显示,车道居中辅助(LCC)是一项舒适性的辅助驾驶功能,包含60km/h以下的交通拥堵辅助(TJA)和60km/h以上的智能巡航辅助(ICA);该功能适用于高速公路且具有清晰车道线的干燥道路工况。
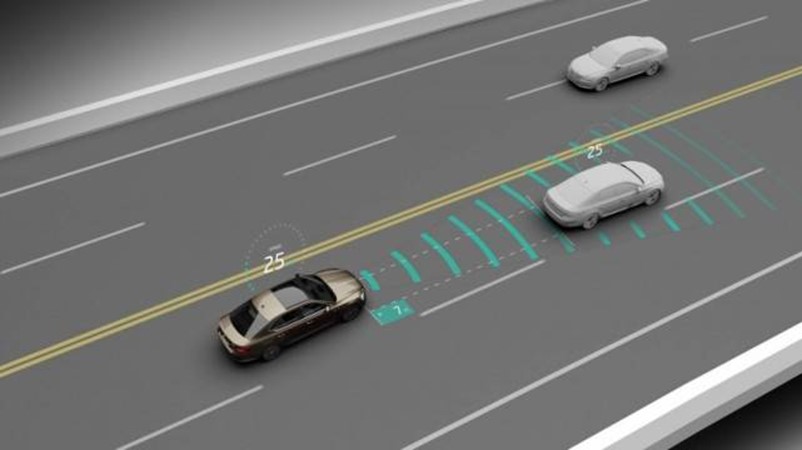
所谓的智能巡航辅助(ICA)其实就是ACC自适应巡航,开启ACC功能后,车辆将保持设定的最大巡航速度向前行驶。如果检测到前方有车辆低于巡航速度,ACC 将根据需要降低车速,与前车保持合适的距离。
为了防止用户对该功能的滥用,小鹏也做出了相应的警告:LCC 激活时,仍需始终保持手握方向盘,以便可以在有潜在危险发生时,及时接管车辆;切勿依靠系统来应对突发的紧急情况。务必观察前方路况并准备随时采取纠正措施,否则可能导致严重伤害或死亡!
从事故发生的视频可以看出,事发时天气晴朗,高架上车道线也十分清晰,已经满足开启LCC的前置条件。

那是什么原因导致了此次事故的发生呢?或者换一种说法,是什么导致了小鹏P7感知系统的失效呢(包括LCC和AEB)?
从整个行业来讲,目前应用于ACC自适应巡航,大概有三套感知方案:一种是以特斯拉为代表的纯视觉传感方案,另一种是当前比较常见的毫米波雷达+摄像头的感知方案,最后就是成本更高的激光雷达感知方案。而小鹏P7所采用的就是毫米波雷达+摄像头的感知方案,这也是应用得比较多的一个方案。
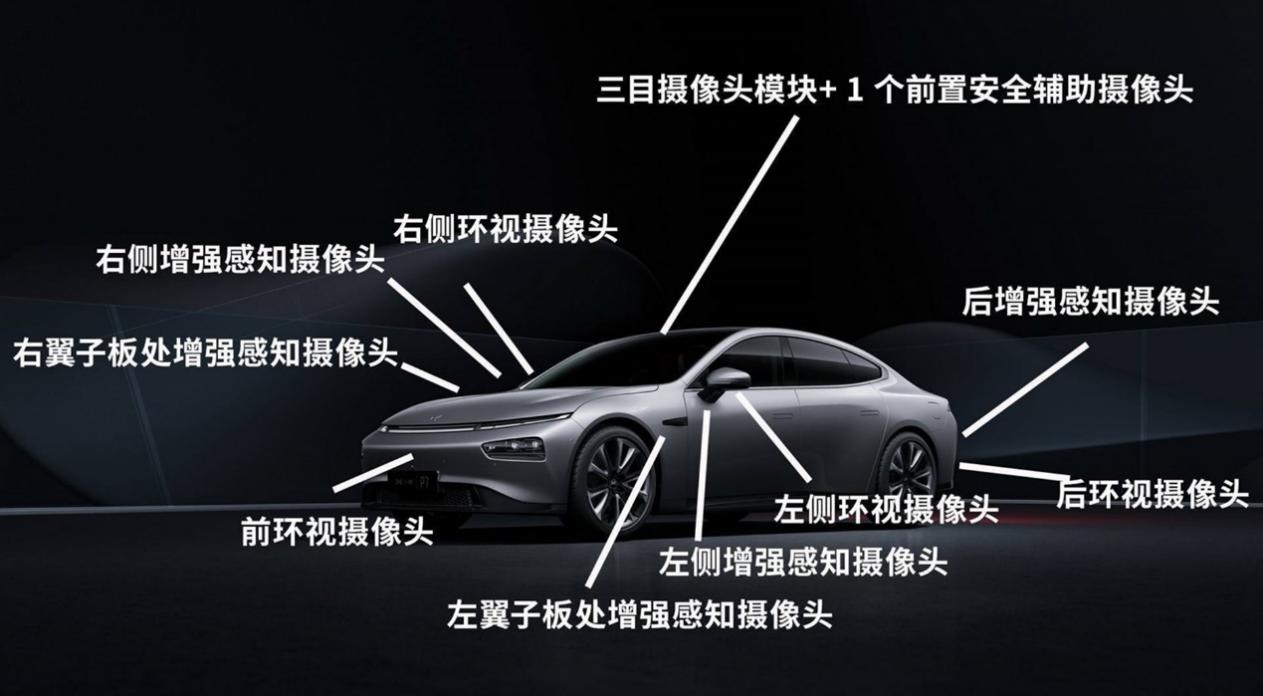
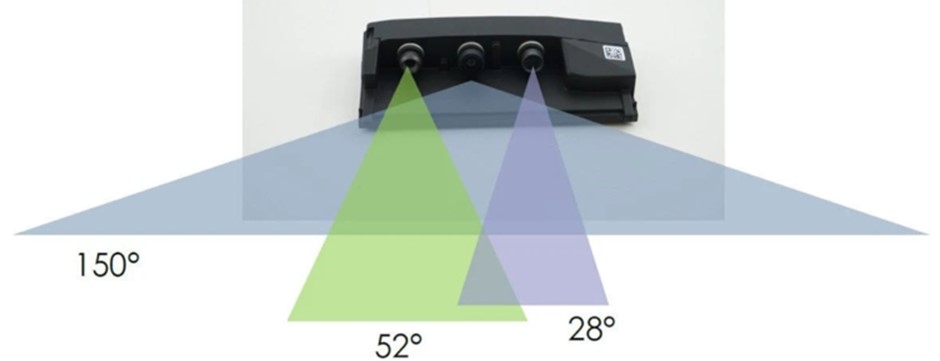
据了解,小鹏P7采用的77hz的毫米波雷达由博世提供,有效探测距离至少200m左右,按照80km/h的速度来推算,留给系统的反应时间至少有9s。而用于LCC和AEB的摄像头则有两个,分别是窄视角的前向摄像头(远距感知)和主前向摄像头(中距感知)。
换句话说,在这场事故中,包括毫米波雷达、前向摄像头、主前向摄像头的三重感知系统全部失效。再加上主驾驶人的分神,最终造成了这场惨烈的交通事故。

为何小鹏P7高架追尾会引起如此大的反响?在车轱辘看来,究其原因就是之前我们对小鹏的智能驾驶太过信任。小鹏汽车作为头部新势力车企之一,可靠的智能驾驶技术一直是它的最大卖点,经过本次事故,外界势必会对小鹏P7智能驾驶的安全性打上一个问号,小鹏汽车尚且如此,更别说其它品牌的智能驾驶技术了。

随着汽车市场逐渐步入新能源时代,与之一同崛起的还有智能驾驶,当前哪个新车发布会如果不提几句新车具备什么样的自动驾驶能力,似乎都上不得台面,甚至连燃油车都加入了这场智能驾驶的竞争中来。

很多车企为了吸引眼球,对智能驾驶技术往往还带有夸大宣传的成分,从业者可能一笑而过,但对于缺少专业知识的普通消费者而言,这往往就会起到误导作用,从而导致智能驾驶的滥用。
写在最后:
从技术层面来讲,现在的L2级自动驾驶只是一个辅助系统,更高级别L3以及往上的自动驾驶落地还需要相当长一段时间,待与之一同完善的,还有法律法规问题。所以对于市面上所有的智能驾驶,车轱辘的观点都是“可以用,但不可完全信任”。

